What's all this E8 stuff about then? Part 1.
With all the buzz about E8 recently I want to give an introduction to it that's pitched slightly higher than pop science books, but that doesn't assume more than some basic knowledge of geometry and vectors and a vague idea of what calculus is. There's a lot of ground to cover and so I can't possibly tell the truth exactly as it is without some simplification. But I'm going to try to be guilty of sins of omission rather than telling outright lies.
Discrete symmetry groups.
Consider a perfect cube. If you turn it upside-down it still looks just like a cube in exactly the same configuration. Rotate it through 90 degrees about any axis going through the centre of a face and it looks the same. Rotate it through 120 degrees around a diagonal axis and it also looks the same. In fact there are 24 different rotations, including simply doing nothing, that you can perform on a cube, that leave it looking how you started. (Exercise: show it's 24.)
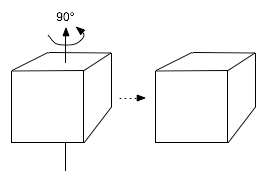
These 24 operations form the symmetries of the cube. Note how you can take any pair of symmetries and combine them to make another symmetry simply by applying one and then another. For example, if A represents rotation by 90° about the x-axis and B represents a rotation by 180° about the same axis then we can use shorthand to write AB to mean a rotation by 270°. The convention is that we read from right to left and so AB means "do B first, then A". If we define C=AB think about what AC means. It's a 270°+90° rotation, ie. a 360° rotation which does nothing. The convention is to call that 1. So C is the opposite or inverse of A because AC=CA=1. When you have a bunch of operations that you can combine like this, and every operation has an inverse, then the operations form what mathematicians call a group. The 24 symmetries of the cube form a group of size 24. Although you can think of a group as a bunch of operations on something, you can also think of a group as a thing in its own right, independent of the thing it acts on. For example, we can write down some rules about A, B and C above. AC=CA=1, C=AB, AAB=1, BB=1, C1=1C=C and so on. In principle we can give a single letter name name to each of the 24 symmetries and write out a complete set of rules about how to combine them. At that point we don't need the cube any more, we can just consider our 24 letters, with their rules, to be an object of interest in its own right.
We can think of the group as acting on the cube, but if we specified some suitable rules, we can make this group act on other things too. For example, we can use the coordinates (x,y,z) to specifiy any point in space. We used B to mean a 180 degree rotation around the x-axis. If we apply that rotation to any point in space (x,y,z) it gets mapped to (x,-y,-z). Similary A maps the point (x,y,z) to (x,z,-y). So the the 24 element cube group also acts on 3D space. This is an example of a group representation, and I'll get onto that later.
(So far I've been talking about rotations we can perform on the cube. But imagine you could also reflect the cube - as if looking at the cube in a mirror and then pulling the reflection back out into the real world. You can't do this with a real cube but you could with an imaginary one. How many symmetries do you think you get now?)
SO(3) and Lie groups
With the cube example above, all of our rotations had to be multiples of certain angles like 90° and 120°. Any kind of rotation through an angle like 37° leaves the cube in a weird orientation that doesn't look like the original. So the symmetries of the cube form a discrete group because there's only a discrete set of possibilities. But there are also continuous groups where you can smoothly slide from one symmetry to another and everything in-between is also a symmetry. For example consider a perfect 3D sphere at the origin. You can rotate it through any angle and it still looks like the same sphere. Any rotation about the origin is a symmetry of the sphere, and given two symmetries you can slide from one to the other. At every stage, the sphere will still look like the original sphere. Like in the discrete case, this set of symmetries forms a group, because you can combine and invert operations. But there are now infinitely many operations. We can rotate around any axis by any angle we choose and it's still a sphere. But even though there is an infinity of such rotations, it's still manageable. In fact, any rotation can be described by three parameters, for example the three that aeronautical engineers might use called pitch, roll and yaw. Mathematicians call the group of 3D rotations SO(3). That 3 refers to the fact that we're talking about rotations of 3-dimensional space. But because it takes three parameters to describe a rotation, SO(3) is itself 3-dimensional. This double appearance of the number 3 is a 'coincidence', as we'll see in the next section.
There's one more thing I need to add about continuous groups. Some are also differentiable. You don't need to worry in too much detail about what this means but it ultimately says that we can do calculus with these groups. For example, we can ask questions not only about the orientation of a sphere, but also about the rate of change of its orientation. So SO(3) is a differentiable group. The usual name for these is Lie groups, after the mathematician Sophus Lie.
Subgroups and SO(2)
SO(3) is the group of 3D rotations. But all of the 24 symmetries of the cube we considered are also rotations. So the cube is actually a subset of SO(3). And as it's a subset of a group that's also a group, we call it a subgroup.
Now consider the set of all rotations we could perform on a 2D space. These also form a group. In fact, given an element of this group we can apply it to some text to rotate it in 2D. As above, use 1 to mean "no rotation", use A to mean "rotate 45° anticlockwise" and B to mean "rotate 45° clockwise". We can illustrate how these act on Hello:
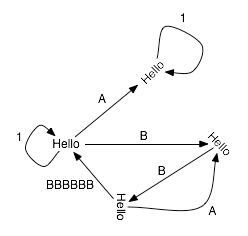
If you've ever playing with a drawing package, like the one I just used, this will all be very familiar. And it should also be obvious that 1=11111=AB=BA=AAAAAAAA=BBBBBBBB. (Note how I'm only talking about the orientation of the word. If we were taking into account the position of the word on the page it'd be more complex. But there would still be a group describing it.)
Although the screen the text Hello is on is flat and two-dimensional, it can be considered to be embedded in the 3D space around it. And all of the 2D rotations can be considered to be 3D rotations also, just 3D rotations that happen to be oriented along the axis pointing straight into the screen.
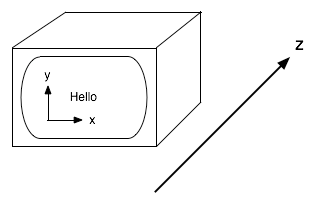
So 2D rotations can be considered to be particular 3D rotations and and SO(2) is a subgroup of SO(3).
Note that 2D rotations can be described by just a single number, the rotation angle. So SO(2) is 1-dimensional, even though it's defined through its effect on a 2D space. The two threes that appear in connection with SO(3) above really are a coincidence. In 4-dimensions we have SO(4) which is actually a 6-dimensional group. In 4D you need 6 numbers like pitch, roll and yaw to define your orientation. But I'm not asking you to try to visualise that now.
Rates of change and Lie algebras.
Imagine a sphere tumbling around. At any moment its orientation in space can be described by an element of SO(3). So we might naturally be led to ask the question "what is its rate of change of orientation?". What would such an answer look like?
Let's review basic calculus first. Consider position instead of orientation. Suppose a vehicle is driving along a road. At time t it's at distance A and at time t+1s it's at distance B. Then its average velocity over the 1s is (B-A)/1s. But that's an average over a period. What's its velocity exactly at time t? We could compute its distance, say C, at time t+0.0001s, and compute (C-A)/0.0001s. But that's still an average over a short period of time.The tool for telling us about instantaneous rates of change is calculus, and here it tells us that if the motion is continuous we can take a limit. So if at time t+d, its position is given by D, then the velocity is the limit, as d tends to zero, of (D-A)/d.
Back to the tumbling sphere. We could say "at time t it has orientation A and time t+1s it has orientation B". But as with velocity, that tells you what happened between t and t+1s, not what it was doing at any instant. We haven't said what the rate of change is precisely at time t. Imagine we take some kind of limit of the above statement as we consider the change from time t to time t+d where d becomes arbitrarily small. One thing we can say is that if the motion is continuous then the start and finish orientations, say A and D, will become arbitrarily close. The difference between them will be an infnitesimally small rotation. You can describe an infinitesimally small rotation by an infinitesimally small vector: let the direction of the vector be the axis of rotation and its length be the angle of rotation. Suppose this vector is V. Then the rate of change of orientation is V/d. This is commonly known as angular velocity and it's a vector. Note that it's not an infinitesimally small vector because the small V and small d will usually cancel to give a nice finite size angular velocity, just as the ordinary velocity calculation above gives a finite answer. In fact, we can easily interpret the angular velocity vector. Its direction is the axis of rotation and its length is the rate of change of angle around that axis (in degrees per second for example).
At this point you might say "why not represent any angle by a vector, not just an infinitesimal one". For example, you might think v=(180°,0,0) could be used to mean a rotation through 180° around the x-axis. You can do that if you like, but this doesn't resepct the additive properties of vectors. For example, it'd be useful if v+v=(360°,0,0) then represented "no rotation" because a 360° rotation is no rotation at all. But "no rotation" should be represented by (0,0,0). So this isn't a very convenient way to talk about rotations. But rates of change of orientation are different. If we define w=(180°/s,0,0) then w represents rotation around the x-axis at one revolution every two seconds. w+w=(360°/s,0,0) is also a perfectly good angular velocity, one that's twice as fast. Unlike angles, angular velocities don't wrap around when you get to 360°. You can crank angular velocities up as high as you like. So vectors are a good way to represent rates of change of orientation, even if they're not good at representing orientations.
Let's do this in 2D. It's much easier. All rotations are in the plane and so we don't need to specify an axis. We just need to specify a single number to define an orientation, and a rate of change of orientation is just given by a single number also. That one number can be thought of as a 1-dimensional vector.
So what kind of thing is this rate of change object? In each case it can be thought of as a vector (in the case of SO(2) it's a 1-dimensional vector), but it's not an element of the group because an angular velocity is not the same thing as an orientation. Mathematically it's called an element of a Lie algebra. The Lie algebra of a Lie group is the set of vectors that describe rates of change of elements of the group. I mentioned above that SO(4) is 6-dimensional. This means that the Lie algebra is made of 6-dimensional vectors. You can think of the 6 components of these vectors as describing how the 6 generalised pitch, roll and yaw parameters vary over time.
There's a convention that we use lower case names for Lie algebras. So the Lie algebra of SO(3) is called so(3). That makes a sort of intuitive sense, so(3) describes really small rotations and SO(3) describes full-sized ones.
Closing words
That brings me close to the end of Part 1. But I can now say one very important thing. There are a number of things that mathematicians call E8, but one of them is a Lie algebra. And that's the thing that Garrett Lisi is talking about.
PS I welcome feedback from anyone. I want to make this as understandable to as many people as possible.
Discrete symmetry groups.
Consider a perfect cube. If you turn it upside-down it still looks just like a cube in exactly the same configuration. Rotate it through 90 degrees about any axis going through the centre of a face and it looks the same. Rotate it through 120 degrees around a diagonal axis and it also looks the same. In fact there are 24 different rotations, including simply doing nothing, that you can perform on a cube, that leave it looking how you started. (Exercise: show it's 24.)

These 24 operations form the symmetries of the cube. Note how you can take any pair of symmetries and combine them to make another symmetry simply by applying one and then another. For example, if A represents rotation by 90° about the x-axis and B represents a rotation by 180° about the same axis then we can use shorthand to write AB to mean a rotation by 270°. The convention is that we read from right to left and so AB means "do B first, then A". If we define C=AB think about what AC means. It's a 270°+90° rotation, ie. a 360° rotation which does nothing. The convention is to call that 1. So C is the opposite or inverse of A because AC=CA=1. When you have a bunch of operations that you can combine like this, and every operation has an inverse, then the operations form what mathematicians call a group. The 24 symmetries of the cube form a group of size 24. Although you can think of a group as a bunch of operations on something, you can also think of a group as a thing in its own right, independent of the thing it acts on. For example, we can write down some rules about A, B and C above. AC=CA=1, C=AB, AAB=1, BB=1, C1=1C=C and so on. In principle we can give a single letter name name to each of the 24 symmetries and write out a complete set of rules about how to combine them. At that point we don't need the cube any more, we can just consider our 24 letters, with their rules, to be an object of interest in its own right.
We can think of the group as acting on the cube, but if we specified some suitable rules, we can make this group act on other things too. For example, we can use the coordinates (x,y,z) to specifiy any point in space. We used B to mean a 180 degree rotation around the x-axis. If we apply that rotation to any point in space (x,y,z) it gets mapped to (x,-y,-z). Similary A maps the point (x,y,z) to (x,z,-y). So the the 24 element cube group also acts on 3D space. This is an example of a group representation, and I'll get onto that later.
(So far I've been talking about rotations we can perform on the cube. But imagine you could also reflect the cube - as if looking at the cube in a mirror and then pulling the reflection back out into the real world. You can't do this with a real cube but you could with an imaginary one. How many symmetries do you think you get now?)
SO(3) and Lie groups
With the cube example above, all of our rotations had to be multiples of certain angles like 90° and 120°. Any kind of rotation through an angle like 37° leaves the cube in a weird orientation that doesn't look like the original. So the symmetries of the cube form a discrete group because there's only a discrete set of possibilities. But there are also continuous groups where you can smoothly slide from one symmetry to another and everything in-between is also a symmetry. For example consider a perfect 3D sphere at the origin. You can rotate it through any angle and it still looks like the same sphere. Any rotation about the origin is a symmetry of the sphere, and given two symmetries you can slide from one to the other. At every stage, the sphere will still look like the original sphere. Like in the discrete case, this set of symmetries forms a group, because you can combine and invert operations. But there are now infinitely many operations. We can rotate around any axis by any angle we choose and it's still a sphere. But even though there is an infinity of such rotations, it's still manageable. In fact, any rotation can be described by three parameters, for example the three that aeronautical engineers might use called pitch, roll and yaw. Mathematicians call the group of 3D rotations SO(3). That 3 refers to the fact that we're talking about rotations of 3-dimensional space. But because it takes three parameters to describe a rotation, SO(3) is itself 3-dimensional. This double appearance of the number 3 is a 'coincidence', as we'll see in the next section.
There's one more thing I need to add about continuous groups. Some are also differentiable. You don't need to worry in too much detail about what this means but it ultimately says that we can do calculus with these groups. For example, we can ask questions not only about the orientation of a sphere, but also about the rate of change of its orientation. So SO(3) is a differentiable group. The usual name for these is Lie groups, after the mathematician Sophus Lie.
Subgroups and SO(2)
SO(3) is the group of 3D rotations. But all of the 24 symmetries of the cube we considered are also rotations. So the cube is actually a subset of SO(3). And as it's a subset of a group that's also a group, we call it a subgroup.
Now consider the set of all rotations we could perform on a 2D space. These also form a group. In fact, given an element of this group we can apply it to some text to rotate it in 2D. As above, use 1 to mean "no rotation", use A to mean "rotate 45° anticlockwise" and B to mean "rotate 45° clockwise". We can illustrate how these act on Hello:

If you've ever playing with a drawing package, like the one I just used, this will all be very familiar. And it should also be obvious that 1=11111=AB=BA=AAAAAAAA=BBBBBBBB. (Note how I'm only talking about the orientation of the word. If we were taking into account the position of the word on the page it'd be more complex. But there would still be a group describing it.)
Although the screen the text Hello is on is flat and two-dimensional, it can be considered to be embedded in the 3D space around it. And all of the 2D rotations can be considered to be 3D rotations also, just 3D rotations that happen to be oriented along the axis pointing straight into the screen.

So 2D rotations can be considered to be particular 3D rotations and and SO(2) is a subgroup of SO(3).
Note that 2D rotations can be described by just a single number, the rotation angle. So SO(2) is 1-dimensional, even though it's defined through its effect on a 2D space. The two threes that appear in connection with SO(3) above really are a coincidence. In 4-dimensions we have SO(4) which is actually a 6-dimensional group. In 4D you need 6 numbers like pitch, roll and yaw to define your orientation. But I'm not asking you to try to visualise that now.
Rates of change and Lie algebras.
Imagine a sphere tumbling around. At any moment its orientation in space can be described by an element of SO(3). So we might naturally be led to ask the question "what is its rate of change of orientation?". What would such an answer look like?
Let's review basic calculus first. Consider position instead of orientation. Suppose a vehicle is driving along a road. At time t it's at distance A and at time t+1s it's at distance B. Then its average velocity over the 1s is (B-A)/1s. But that's an average over a period. What's its velocity exactly at time t? We could compute its distance, say C, at time t+0.0001s, and compute (C-A)/0.0001s. But that's still an average over a short period of time.The tool for telling us about instantaneous rates of change is calculus, and here it tells us that if the motion is continuous we can take a limit. So if at time t+d, its position is given by D, then the velocity is the limit, as d tends to zero, of (D-A)/d.
Back to the tumbling sphere. We could say "at time t it has orientation A and time t+1s it has orientation B". But as with velocity, that tells you what happened between t and t+1s, not what it was doing at any instant. We haven't said what the rate of change is precisely at time t. Imagine we take some kind of limit of the above statement as we consider the change from time t to time t+d where d becomes arbitrarily small. One thing we can say is that if the motion is continuous then the start and finish orientations, say A and D, will become arbitrarily close. The difference between them will be an infnitesimally small rotation. You can describe an infinitesimally small rotation by an infinitesimally small vector: let the direction of the vector be the axis of rotation and its length be the angle of rotation. Suppose this vector is V. Then the rate of change of orientation is V/d. This is commonly known as angular velocity and it's a vector. Note that it's not an infinitesimally small vector because the small V and small d will usually cancel to give a nice finite size angular velocity, just as the ordinary velocity calculation above gives a finite answer. In fact, we can easily interpret the angular velocity vector. Its direction is the axis of rotation and its length is the rate of change of angle around that axis (in degrees per second for example).
At this point you might say "why not represent any angle by a vector, not just an infinitesimal one". For example, you might think v=(180°,0,0) could be used to mean a rotation through 180° around the x-axis. You can do that if you like, but this doesn't resepct the additive properties of vectors. For example, it'd be useful if v+v=(360°,0,0) then represented "no rotation" because a 360° rotation is no rotation at all. But "no rotation" should be represented by (0,0,0). So this isn't a very convenient way to talk about rotations. But rates of change of orientation are different. If we define w=(180°/s,0,0) then w represents rotation around the x-axis at one revolution every two seconds. w+w=(360°/s,0,0) is also a perfectly good angular velocity, one that's twice as fast. Unlike angles, angular velocities don't wrap around when you get to 360°. You can crank angular velocities up as high as you like. So vectors are a good way to represent rates of change of orientation, even if they're not good at representing orientations.
Let's do this in 2D. It's much easier. All rotations are in the plane and so we don't need to specify an axis. We just need to specify a single number to define an orientation, and a rate of change of orientation is just given by a single number also. That one number can be thought of as a 1-dimensional vector.
So what kind of thing is this rate of change object? In each case it can be thought of as a vector (in the case of SO(2) it's a 1-dimensional vector), but it's not an element of the group because an angular velocity is not the same thing as an orientation. Mathematically it's called an element of a Lie algebra. The Lie algebra of a Lie group is the set of vectors that describe rates of change of elements of the group. I mentioned above that SO(4) is 6-dimensional. This means that the Lie algebra is made of 6-dimensional vectors. You can think of the 6 components of these vectors as describing how the 6 generalised pitch, roll and yaw parameters vary over time.
There's a convention that we use lower case names for Lie algebras. So the Lie algebra of SO(3) is called so(3). That makes a sort of intuitive sense, so(3) describes really small rotations and SO(3) describes full-sized ones.
Closing words
That brings me close to the end of Part 1. But I can now say one very important thing. There are a number of things that mathematicians call E8, but one of them is a Lie algebra. And that's the thing that Garrett Lisi is talking about.
PS I welcome feedback from anyone. I want to make this as understandable to as many people as possible.
posted by sigfpe at Saturday, November 17, 2007
![]()
![]()
33 Comments:
Great intro. Do the members of the Lie algebra also form a group? I'm just thinking about the SO(2) example here, but it seems to me that the members of the Lie algebra are just like the members of the Lie group, except we no longer do our addition modulo 360 degrees.
The members of a Lie algebra form a group in a trivial way. You can add and subtract the elements as they form vectors in a vector space. But this what is called a commutative or abelian group where x+y is the same as y+x. Consider "full-size" rotations". For example let A by a 90 degree rotation about x and B a 90 degree rotation about y. With your hand you can easily show that AB is not the same as BA. So infinitesimal rotations "commute" with each other and full size ones don't. However, there's a vestige of this non-commutativity still left in the Lie algebra. There's another operation you can perform on the elements of the Lie algebra that I haven't mentioned: the "Lie bracket" operation. I probably won't get around to talking about this though. But very roughly, it measures the amount by which Lie algebra elements fail to commute as you start growing them to be full-sized. This is all very vague but I hope it gives some intuition.
There's lots more here: http://en.wikipedia.org/wiki/Lie_algebra
Please continue this good work.
On the other hand, I am very curious if there is any mathematical relation between SU(3)xSU(2)xU(1) and E8.
Dan,
Thanks for this. It was exactly at the right level for this almost-but-not-quite-math-major who took and liked Abstract, but doesn't remember much of it.
Challenging, but not so that I gave up.
typo at the end of the third paragraph of "Rates of change and Lie algebras" section:
Its length is the direction of rotation and its length is the rate of change of angle around that axis (in degrees per second for example).
This is commonly known as angular velocity and it's a vector.
Hey, no outright lies! It's a bivector, and you know it!
Seriously, it's a great article.
A couple of nitpicking points:
"Imagine a sphere tumbling around. At any moment its orientation in space can be described by an element of SO(3)."
That's true only after we've picked a 'standard' orientation. Then the orientation of the sphere at a particular moment is given by some SO(3) rotation from the fixed 'standard' one. But without that fixed reference, there's no natural correspondence between orientations and SO(3) elements.
"So what kind of thing is this rate of change object? [...] Mathematically it's called a Lie algebra."
Don't you mean "an element of a Lie algebra"?
Fantastically clear! Well done :)
I'm really curious where all this is leading to, as I haven't heard about this E8 buzz before.
The cube rotations are not a dihedral group.
The third paragraph of the section "Rates of change and Lie algebras" ends with a sentence with a typo: "Its length is ... and its length is ..."
Thanks for the corrections, most of which I've applied.
Pseudonym, the bivector thing is one of my favourite nitpicks, but today I'm using the word 'vector' to mean 'an element of a vector space', so it doesn't apply. The word vector is a little overloaded isn't it.
Thanks for writing this I am thoroughly enjoying it.
"If we apply that rotation to any point in space (x,y,z) it gets mapped to (x,-y,-z). Similary A maps the point (x,y,z) to (x,z,-y)."
Should it be (x,-y,z) at the end?
Thanks for a beautifully clear article. I'm looking forward to the next parts.
Hi!
This has been posted at http://www.physicsforums.com/showthread.php?p=1510223#post1510223 Layman's explanation wanted.
I can see that you are doing a much better job than what I was attempting.
Time for the pros to take over.
Jal
You didn't correct the thing about the cube group being the dihedral group of order 24. It isn't. It's the symmetric group of order 24.
To see this, consider the action of the group on the four diagonals of the cube. Any of the 24 possible permutations of the diagonals can be effected by a single rotation of the cube. Thus the group is S4.
Thank you for putting the time in to write this explanation! I have read a little bit of group theory and played around with a book/software package called "Exploring Abstract Algebra with Mathematica," but did not get that far. Anyway, I am referring my friends to your blog for a basic introduction to E8. Most of them will probably get through the first few paragraphs and kind of fade out, but that's OK... it's better than no understanding!
Mark,
Is your browser acting up? I'm pretty sure I removed all occurrences of the word 'dihedral' as soon as you pointed out my error. I decided not to give this group any name (other than cube group) because I don't really want to spend much time on finite groups. But thanks for pointing the issue.
So far I've only said roughly what a Lie group and Lie algebra are, and that E8 is an example of these things. But there are infinitely many Lie groups and Lie algebras. In part II, besides talking more about Lie groups, I hope to zoom in a bit and single out E8 from all of the others and say something about what makes it special. In part III I'll then try to show why group theory is so important to physics and how properties of Lie groups can be (or might be) interpreted as properties of the real world.
William, this is great! Nice job.
William? Who's William?
We used B to mean a 180 degree rotation around the x-axis. If we apply that rotation to any point in space (x,y,z) it gets mapped to (x,-y,-z). Similary A maps the point (x,y,z) to (x,z,-y).
I don't understand. Wouldn't 180 degrees (B) be (x,y,-z) or (x,y,+z), and wouldn't 90 degrees (A) be (x,-y,-z) or (x,+y,+z) or (x,-y,+z) or (x,+y,-z)?
So the cube is actually a subset of SO(3).
A bit unclear: you should probably say "the symmetry group of the cube" or something similar. The cube itself isn't a subset of SO(3)!
But generally a really nice article. Look forward to Part 2.
Since this post is still a lot about groups, I think I can advise to your readers this cool freeware : GroupExplorer
Unfortunately, I don't know any good software to help you draw your ADE diagrams for your next post :-)
Hi sigfpe,
This is an impressive post.
Is there any way to do this relatively easily in 3D rather than in 2D?
For example, some engineers appear to use 3D helical functions rather than 2D elliptical functions.
Oops, sorry Dan. I thought you were someone else. I'll blame it on my inbox trying to kill me.
When's part 2 coming out?
Garrett,
The next part comes out when I manage to come up with some kind of informal layman's description of what the weights of a representation are. I have some ideas. Probably Friday as I'll have the day off.
Great post. Thoroughly understandable and fun. Seems this is a typo: "Its length is the direction of rotation and its length is the rate of change of angle around that axis"
Great job: my niece is going to use it, here in Italy, for a small work at school.
Looking forward for the second part.
Luca
I went back through some of your archives, so forgive the untimeliness of this post. Hopefully that won't be too hard, since most of the mathematics was timely a century ago ;-)
First, this article is great. It explains in comparably lay terms about groups and symmetry. (I always wondered what a Lie group was before this post, and now I at least have an idea of what flavor they are).
My only confusion came about at the very end, where you began to talk about differentiability. (Calculus was always my weakness!) Correct me if I'm wrong, but when we talk about a group G being lie, we're really saying that a function f:R->G is differentiable (in some manner or another)?
Also, took me a second to grok the idea at the beginning of when two transformations are different. In some hypothetical future revision of this blog post, it might make it a little easier to explain that the equivalence between transformations is the same as equivalence of functions: that f = g iff for all points p, p transformed under f is the same as p transformed under g.
Dear Sigfpe,
As a non-mathematician it's pretty obvious to me that if you can use an angle to describe a 2D rotation - then you can use two angles to describe a 3D rotation - so I'm not sure your explanation leading to 6 numbers needed to describe 4 dimensions is very convincing.
Otherwise many thanks for the article.
Dear Sigfpe,
Many thanks for a great article. However to a non-mathematician it's pretty obvious that if you can define a 2D rotation using an angle, then you can define a 3D rotation using two angles. So your explanation leading to 6 numbers for 4 dimensional space is not very convincing. Have I missed something ?
Dear Sigfpe,
As a non-mathematician it's pretty obvious to me that if you can use an angle to describe a 2D rotation - then you can use two angles to describe a 3D rotation - so I'm not sure your explanation leading to 6 numbers needed to describe 4 dimensions is very convincing.
Otherwise many thanks for the article.
Dear Sigfpe,
As a non-mathematician it's pretty obvious to me that if you can use an angle to describe a 2D rotation - then you can use two angles to describe a 3D rotation - so I'm not sure your explanation leading to 6 numbers needed to describe 4 dimensions is very convincing.
Otherwise many thanks for the article.
Jeremy,
2 angles certainly won't do for 3D rotations even if it might seem obvious to you. You can read about it (with animations) here.
In n dimensions you need n(n-1)/2 angles.
Post a Comment
<< Home