So, my first project was to implement a light switch. Here it is:
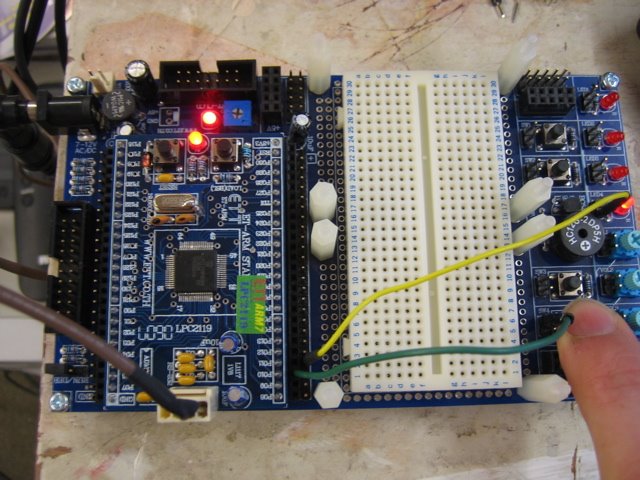
You can see my finger pressing the button and the LED switched on.
And here's the code running on the microcontroller:
loop = do IO {
a <- iopin0;
if band 1024 a>0 then
ioset0 2048
else
ioclr0 2048;
loop
}.
start = do IO {
pinsel0 0;
iodir0 2048;
loop
} 666.
The programming language is my as yet unnamed lazy pure functional language described here.
The code is compiled into C via an intermediate bytecode representation. It's inefficient. Although each 'word' in the code typically compiles to one or two bytecodes, each bytecode expands to around half a dozen 32 bit instructions. (And that can grow if there's lots of lambda lifting going on.) By switching the compiler to thumb mode I got that down to 16 bits per intruction so it's still about a dozen or more bytes per bytecode. Still, with 128K to burn, who's counting? The complete executable is about 48K in size (that's mostly the library, the code itself ). The stack and heap appear to be well behaved. I've managed to run simple logic programs using the list monad without filling the 16K of RAM.
So a quick bit of explanation of the code: the 'main' function is called 'start'. pinsel0 is the C primitive function that sets a bunch of microcontroller pins to function as general I/O ports. iodir0 uses the supplied bitmask to set a bunch of ports to be output ports. (Port 11 in this case.) iopin0 is the function to return the inputs from the I/O ports and ioset0 and ioclr0 set or clear the appropriate I/O ports. Port 10 is connected to the switch and port 11 to the LED. 'band' is my binary 'and' function.
Unlike Haskell, my language is untyped so the 'do' function (it is a function) takes an argument, in this case IO, to specify which monad we're in. I'm using the IO monad to sequence the events (ie. I want the input to be read before the LED state is updates).
And the last thing that needs explaining is the '666'. My IO monad is basically a state monad that makes use of a sequence function 'seq' to ensure that things are evaluated in the right order. 666 is the state that's passed through the monad. It's a dummy value (any value would do) but it's presence is vital as a kind of token that represents the value of the world. For example, if you were to unpack the machinery behind the monad (when I release the code) you'd see that ioclr0 implicitly tries to evaluate the token implicitly returned by iopin0 before executing, ensuring that the switch state is read before the LED state is updated.
Note there's no 'real time' support in the sense that the garbage collector is nothing fancy so it can cause stalls. I make no claim that this is a sensible way to program a microcontroller. :-)
I should mention that I used the free evaluation version of the Keil development system under Windows. It was the slickest microcontroller development environment I've used. (Though my experience of these things isn't great...)
And here's a close up of the microcontroller itself:
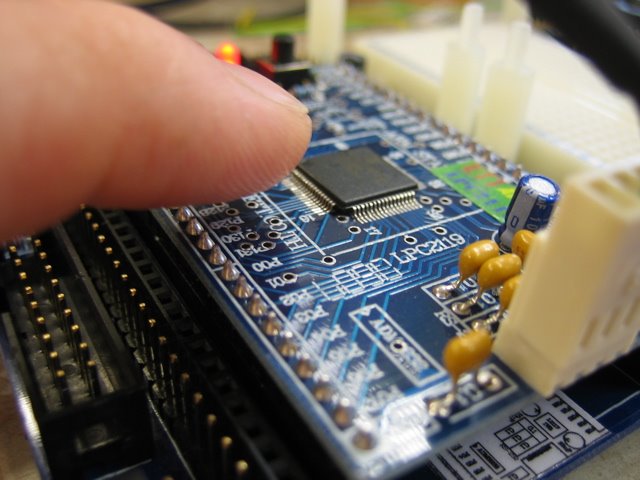
Hard to believe that tiny little black square is busy reducing lambda expressions and garbage collecting!
I think my next project will be to design a language better suited to this kind of hardware. I'm thinking of a stream based language like Supercollider. Strongly typed but with guarantees on memory usage deducible at compile time so no garbage collection. I may also make it functional with a degree of support for closures (but in a way that still limits memory usage) and maybe I'll throw S4 into the type system to support a degree of staged computation, very useful when you really need to lighten the load on the target CPU.
1 comment:
Super cool :)
Post a Comment